Thanks, Jim, yes in two scale this time, 1/144 and 1/100

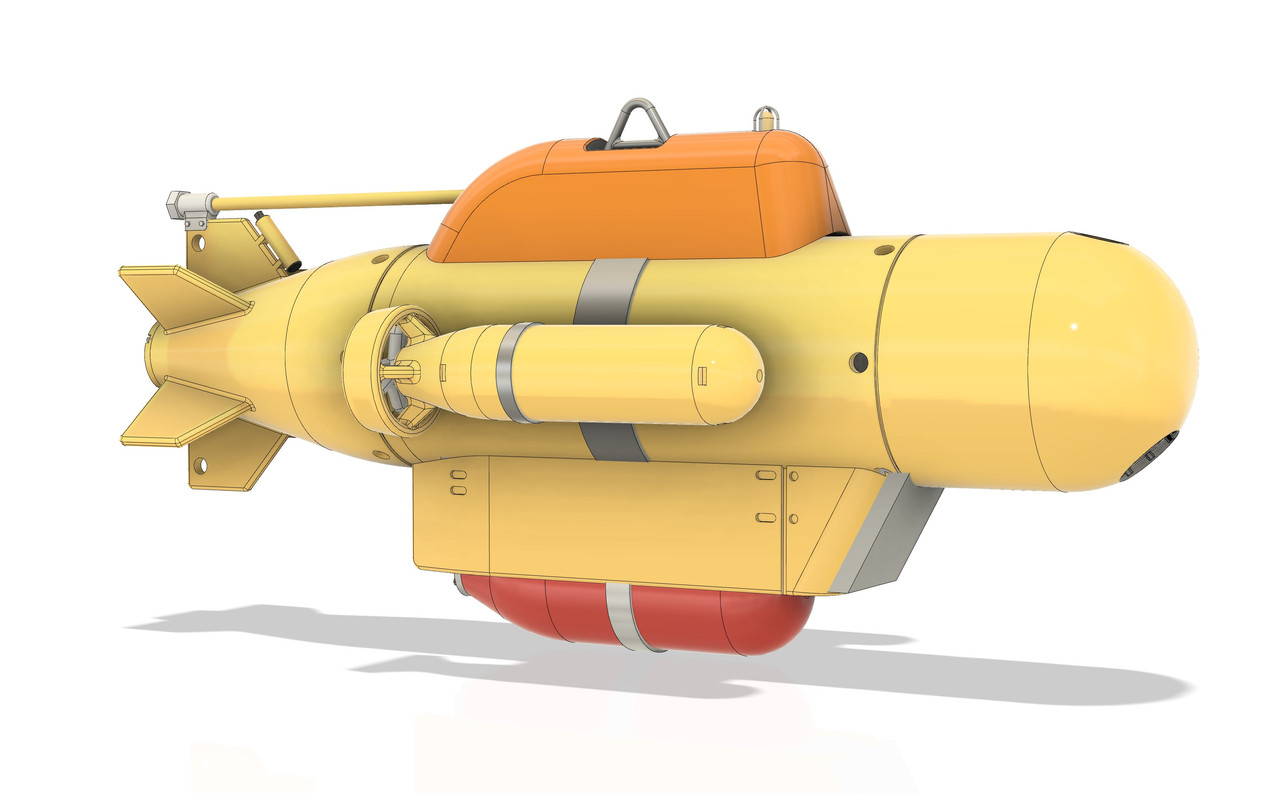
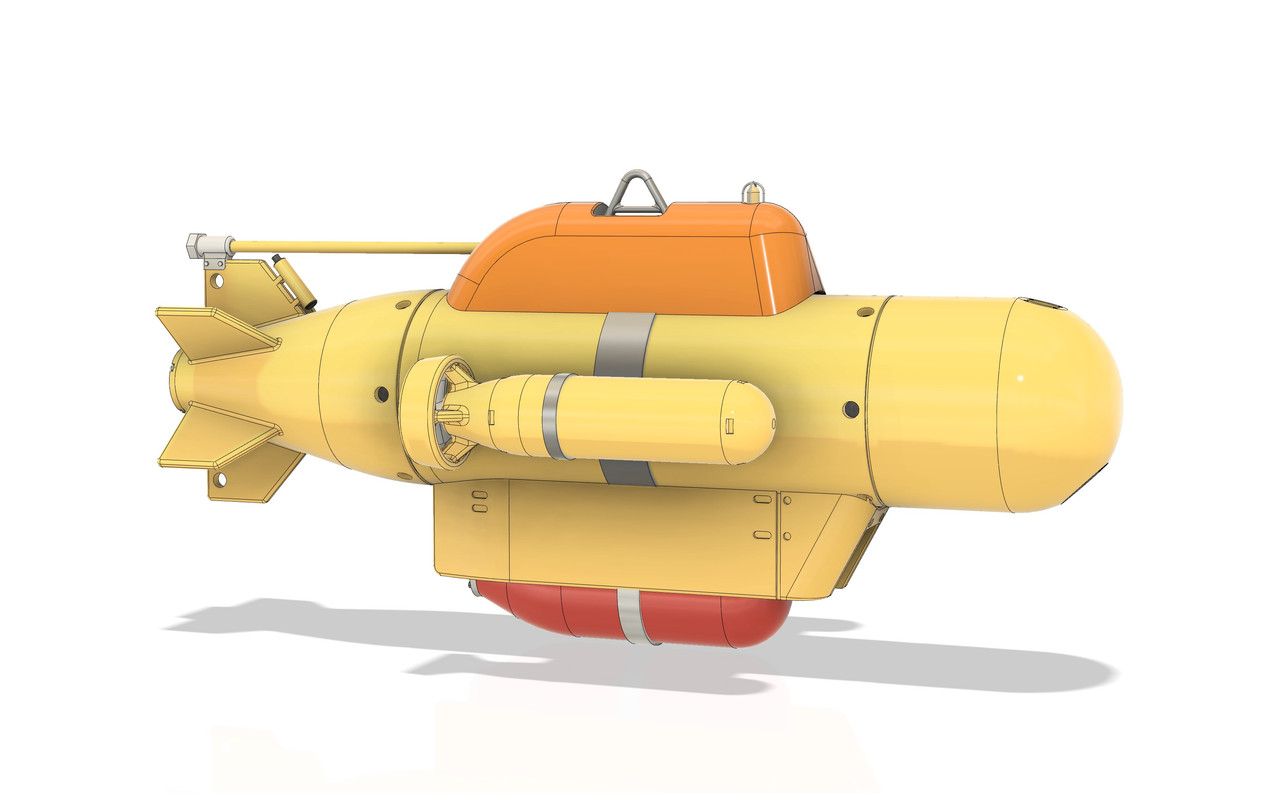
The PAP-104 (Poisson autopiloté/Auto-piloted Fish 104) is a French remotely operated underwater vehicle built by ECA Group and used for mine warfare.


As a robotics specialist, working closely with personnel from the DCAN in St Tropez who had the idea of a demonstrator for an underwater mine-clearing robot, ECA was also subcontracted by the Directorate General of Armament to develop the PAP (Poisson Autopropulsé Piloté), the world's first underwater mine-clearing robot. Development began in 1968 to meet the operational needs of the French Navy. The first PAP-104 underwater anti-mine robot was created in 1970. The DGA then ordered an initial batch of 10. This triggered the decision to establish ECA in Toulon in 1975, where the group's headquarters are currently located.
PAP robots became the benchmark in underwater mine clearance and were ECA's flagship products for 30 years, enjoying huge export success and sold under licence from the French Naval Construction and Armament Directorate (DCAN), making ECA the manufacturer that paid the most royalties to the DCAN during that period.
After a trial production run, the initial Mk2 production model was developed and delivered to the French Navy in 1977, followed by the Mk.3 export model. In 1983, based on a request from the Royal Malaysian Navy, the Mk4 was developed, increasing the operational depth from 120 m to 300 m. In 1986, the Mk5 was developed in response to new requirements from the Royal Navy. In the Royal Navy, early versions such as the Mk2 were introduced under the name RCMDS Mk2 (remote-controlled mine-disposal system).
By 2024, more than 500 units had been built and were in use by some 20 navies around the world. They carried out more than 30,000 operations in 1994 and 45,000 in 2024 in the Red Sea, the Falkland Islands, the Persian Gulf, etc.[2]
The eleven Tripartite-class minehunters in service in 2014 in the French Navy had 35 PAP-104s at that date[3]. They began to be withdrawn from service in the 2020s.
Characteristics
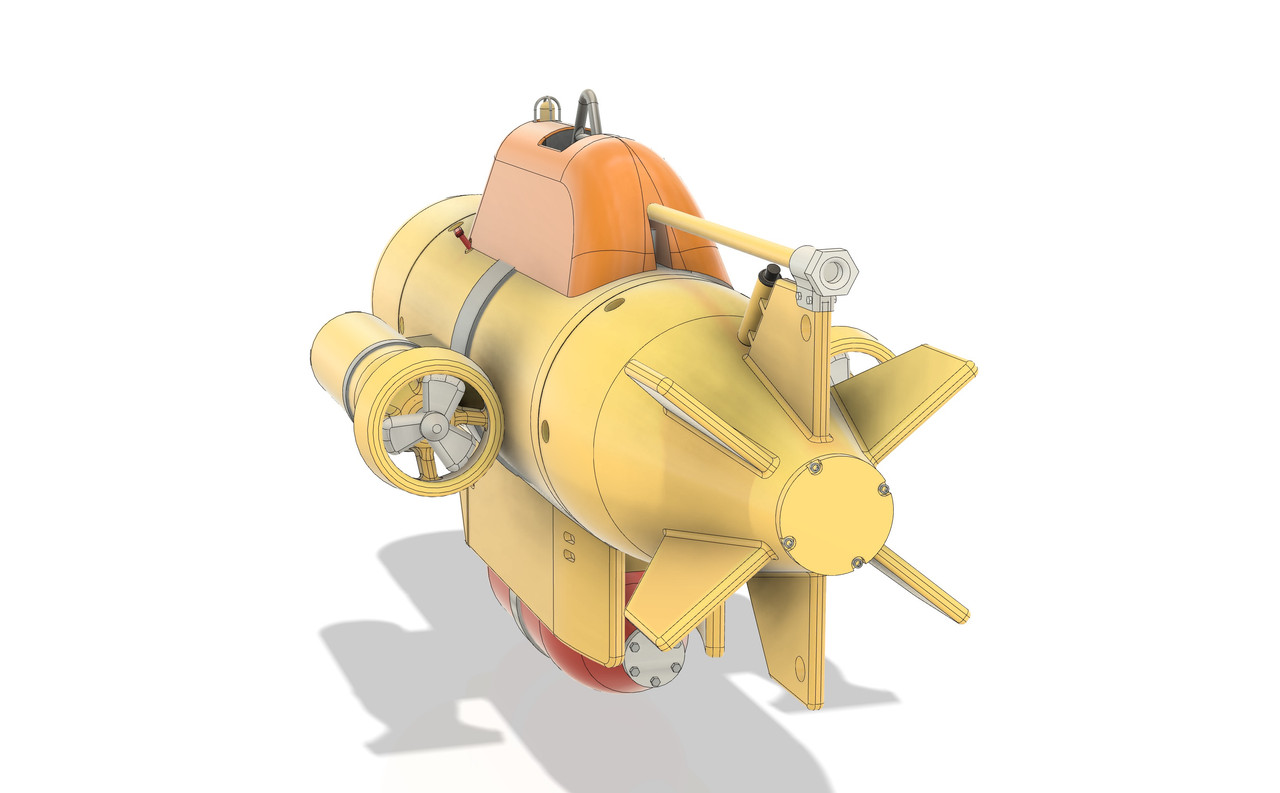
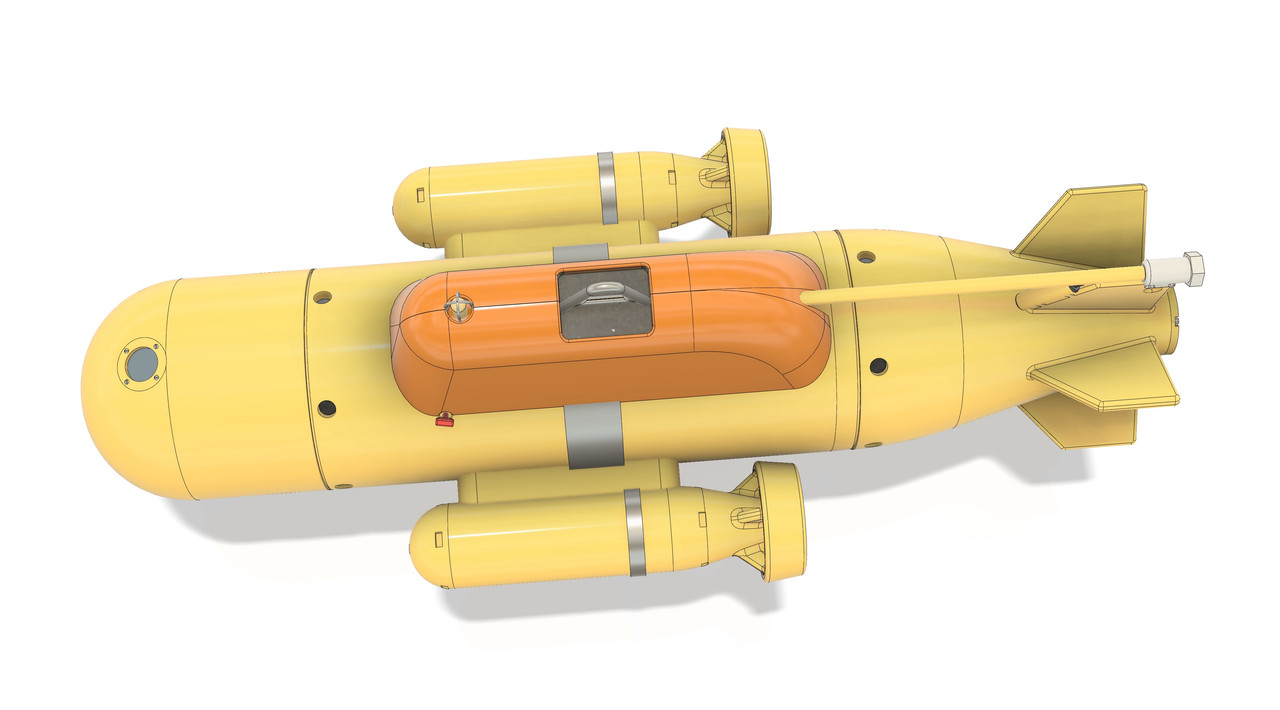
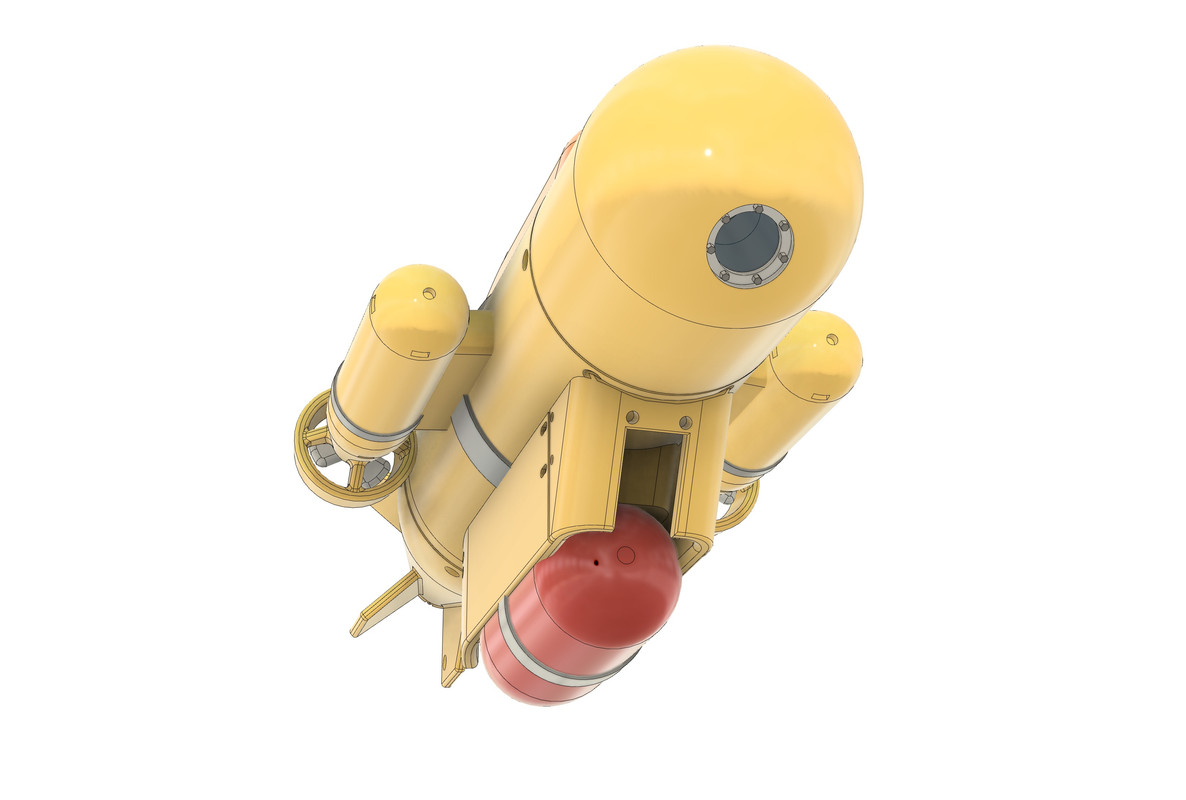
This model is used to eliminate mines detected by sonar. The PAP-104 itself is equipped with a classification sonar (Krupp Atlas AIS 11 high-frequency sonar) and a video camera for mine identification. It is controlled from the mother ship via fibre optics using a cable of up to 1,000 metres and operates up to 600 metres from the vessel. The propulsion system consists of an electric motor attached to both sides and an internal battery power source. It can be equipped with an explosive charge or an underwater grenade weighing between 96[5] and 126 kg[6] and two explosive mooring cutters. The device can be fired remotely or triggered by a CNC (Contre Nageurs de Combat) grenade[7] to deal with both moored and submerged mines. The Mk5 has an unladen weight of 570 kg. It can complete its mission in around 20 minutes.
A Mk6 version, introduced in 2017, is larger and has four electric motors. It is capable of manoeuvring in strong currents and can withstand harsh environmental conditions thanks to its high-powered propulsion capabilities. It can carry a heavy explosive charge, the NATO Mine Disposal Charge, Cutter.
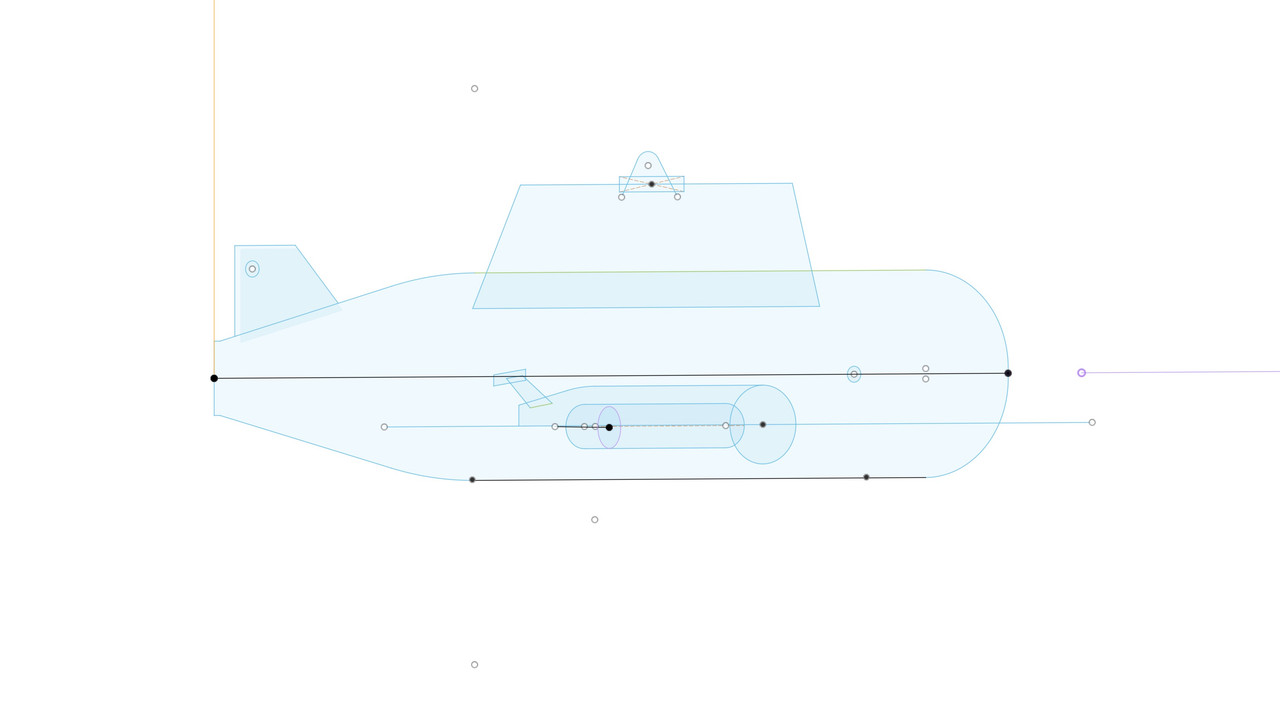
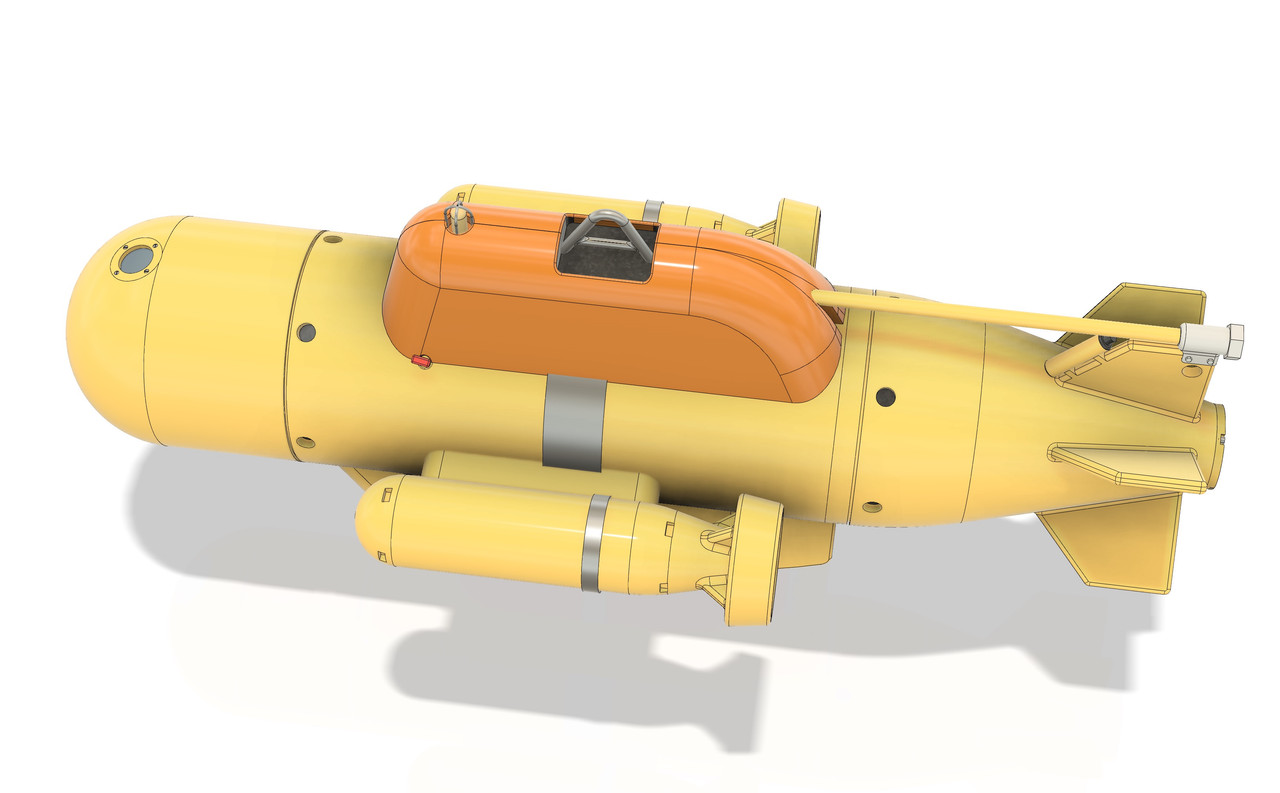
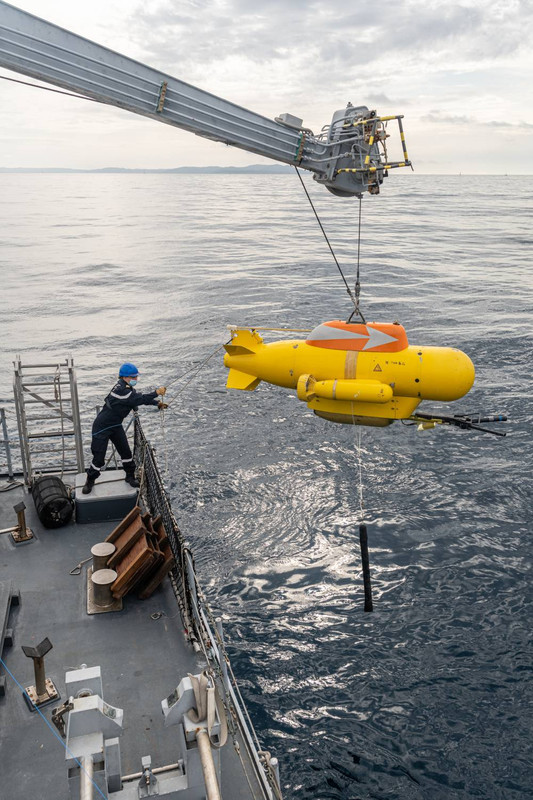
Of course, no plans were found on the internet. As usual, we had to rely solely on photographs of the device. A good profile photo is a good place to start the project.






Almost 6 hours of drawing.