Hey guys,
Recently I discovered that my newest PCB's have some design faults. First of all, both have the chip connected to the ground through 2 ways, one of those ways should have been connected to the + so now the chips wil not work. To make things work, I apparantly found the correct + on the chip when I worked on the superstructure PCB design and thus connected a 3,3V voltage regulator to the + of the chip and therefor also to the ground on the I2C. The result when powering up was some smoke and a tiny flame from the voltage regulator. The design has been modified to correct the mistake.
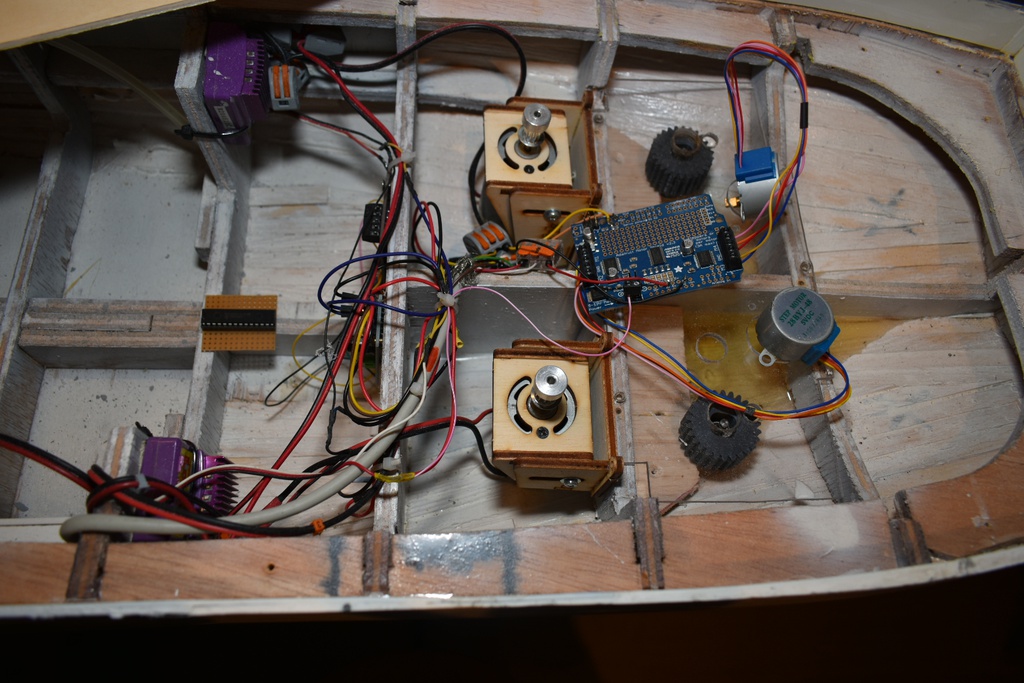
While connecting more and more I2C devices (everything is connected now) I found that the power this draws from the Pi makes the voltage drop too low so the Pi won't start. This still applies when powering the Pi from a USB power socket from the wall. This issue has now been resolved by using the 3,3V regulator on the hull PCB's.

Since the superstructure PCB's all have there own onboard 3,3V regulator I don't need a + cable attached for the I2C. However, the voltage must be within a range of 0,7V difference for this to work, so if the lowest voltage is 3V, the highest cannot exceed 3,7V.


Next wednesday I plan on testing the main engines controlled by an Adafruit motorhat. Is that test fails, I need 2 new ESC's. The first 9-DOF sensor has been placed all the way back, hoping to have as little interference as possible.

I might make a nicely 3D printed support here but this is way better already.

This PCB as intended to be placed further back, but there was no room there. This is the next best thing.

The final version of the transmitter is starting to take shape as well. Unfortunately I run out of black PLA filament, but since there were quite some bumps which need to be filled and sanded I also need to paint the entire transmitter anyways, so it doesn't matter anymore what colour PLA I use.
Greetings Josse
Making a complete new Well Enhancer, again scale 1:75.